

Flight Mechanics and Control
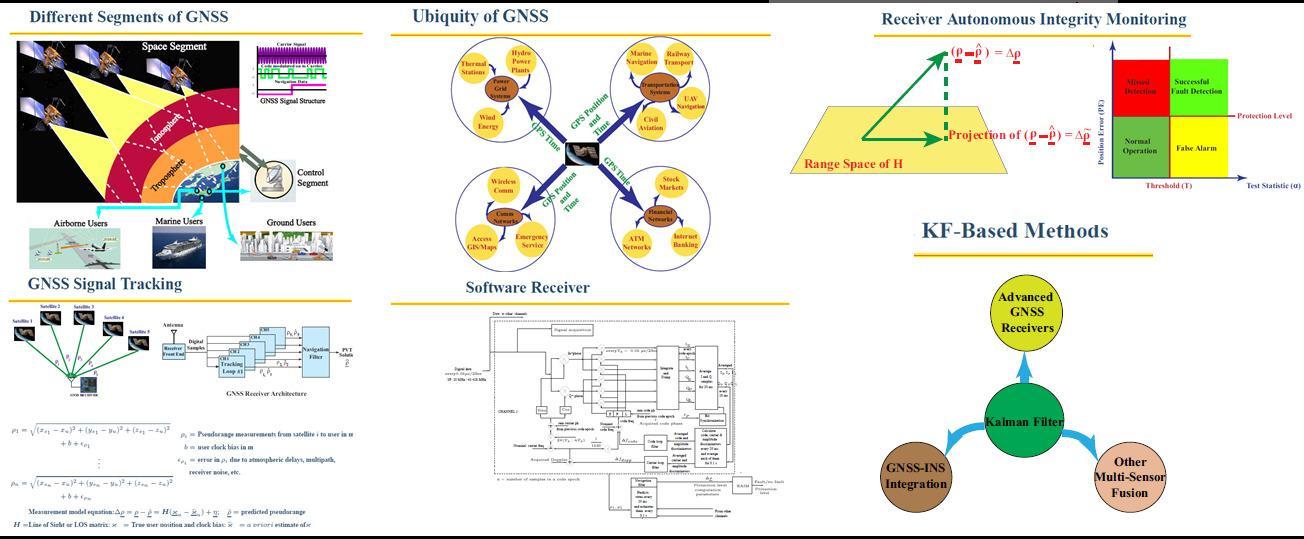
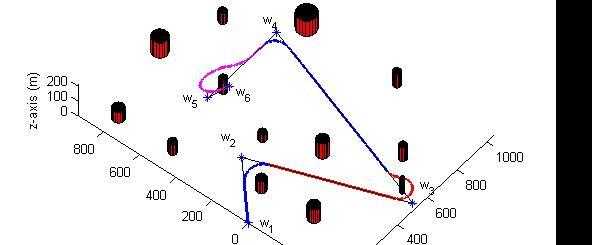
The Flight Mechanics and Control research group at IIT Kharagpur explores a diverse range of topics with a variety of approaches. Specific areas of research include Flight Dynamics and Controls, Flight Testing Design Guidance and Control of Rockets, Parafoil, UAV, MAV, WIG-Craft etc., Space Dynamics, Intelligent Systems, System Identification/Parameter Estimation - Neural Networks, Path planning, Trajectory optimization, Obstacle avoidance algorithms, and multi-agent systems of unmanned vehicle systems, Satellite based Navigation Systems (e.g. GPS, IRNSS etc.) including algorithm development for advanced navigation systems and reliability studies of satellite signals for autonomous/safety or liability-critical applications, Fault detection and Sensor fusion.
Current research activities include: Adaptation of Trajectory Optimization Techniques for Onboard Implementation for Unpowered Air Dropped Glide Vehicle, Altitude control of Magneto-Coulombic Satellites and Development and Validation of Kalman Filter-Based Integrity Monitoring Algorithms for advanced Navigation Systems.
Facilities
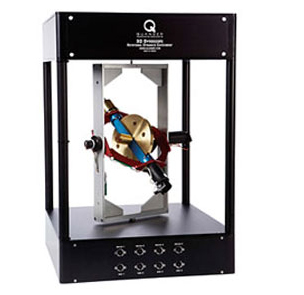
The 3 DOF Gyroscope is a dynamically diverse experimental platform ideal for study of rotational dynamics principles related to the real-life applications including altitude control, momentum wheel control, navigation, satellite orientation, auto-pilot systems and technical devices with gyroscopic sensors, such as smart phones, tablets or video game controllers.
Students learn how to:
- obtain a state-space representation of the open-loop system
- design a state-feedback gain for the closed-loop system using Linear Quadratic Regulator (LQR) optimization
- simulate the system using the designed controller and ensure stability of the system
- implement the state-feedback controller on the system and evaluate its performance
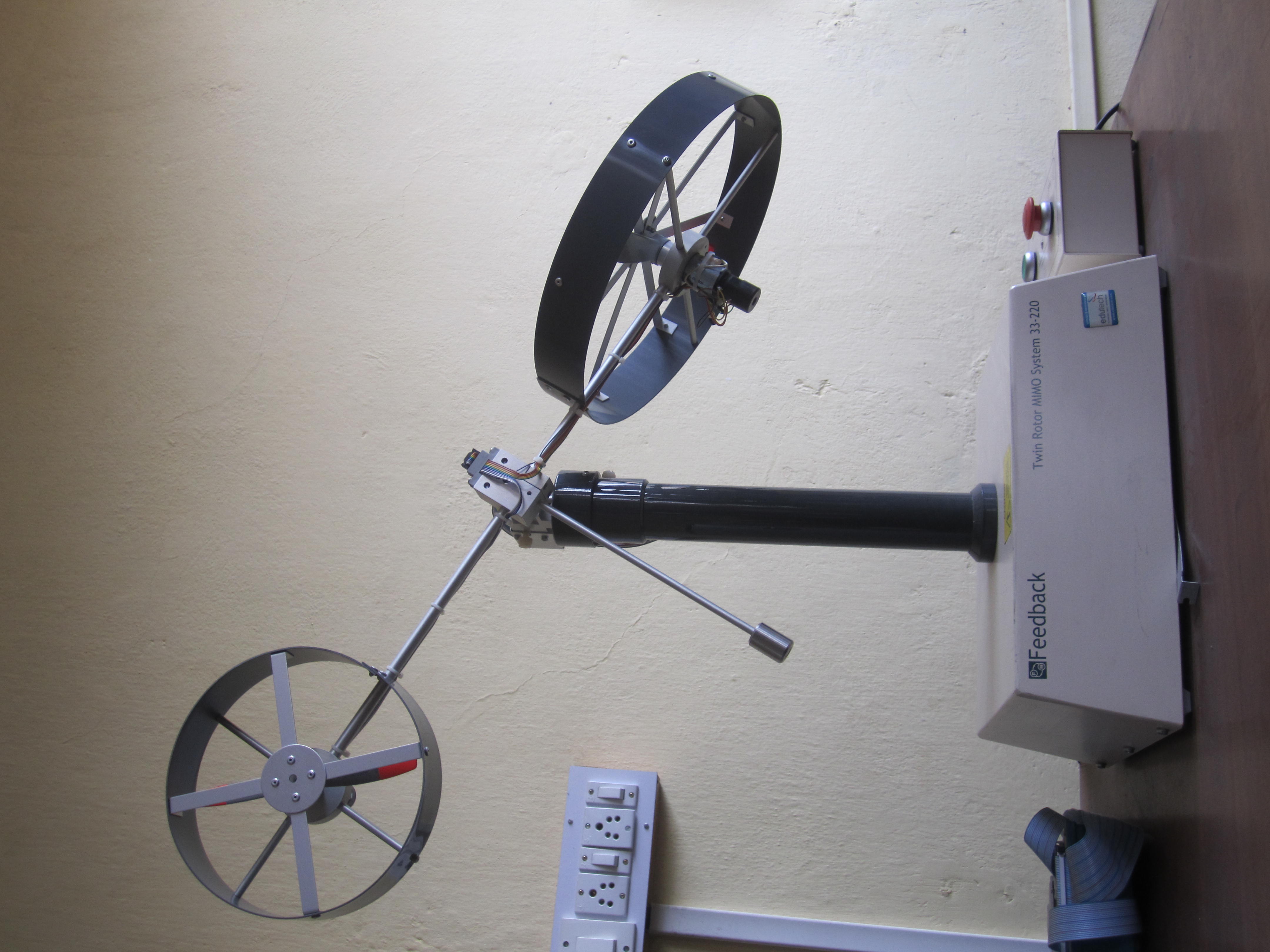
- Two Rotor Aerodynamical System (TRAS) is a laboratory set-up designed for control experiments.
- In certain aspects its behavior resembles that of a helicopter.
- It is Multi Input Multi Output (MIMO) strongly cross-coupled control system.
- It illustrates a high order nonlinear system with significant cross-couplings.
- The TRAS system has been designed to operate with an external, PC-based digital controller.
- The control computer communicates with the position, speed sensors and motors by a dedicated I/O board and power interface.
- It is controlled by the real-time MATLAB/Simulink RTW/RTWT environment.
- A pre-programmed library of controllers and Simulink models supports the TRAS system.

- The Pendulum & Cart System consists of a pole mounted on a cart in such a way that the pole can swing freely only in the vertical plane.
- It is a forth order, nonlinear and unstable real-time control system
- The system operates directly in the MATLAB/Simulink environment.
- The user obtains ready pre-programmed experiments in the real-time using the RTWT toolbox.
- The user also generates his own controller in a very fast and easy way using Simulink and library of drivers.

- The Magnetic Levitation System (MLS) is a nonlinear, open-loop, unstable frictionless dynamical system.
- Both analogue & digital control solutions are implemented.
- The system is fully integrated with MATLAB/Simulink and operates in the real-time in MSWindows.
- In the case of two electromagnets the lower one can be used for external excitation or as a contraction unit. This feature extends the MLS application and is useful in robust controllers design.
- The user has a chance to go step-by-step through the discrete models identification.
- The user can also create his own controller in a fast and easy way.
Faculties
- Manoranjan Sinha
(Lab In-Charge) - Manas Kumar Laha
- Naba Kumar Peyada
- Sikha Hota
- Susmita Bhattacharyya