CHAPTER - 7
7.1 INTRODUCTION
7.2 THIN LAMINATED PLATE THEORY
7.3 BENDING OF LAMINATED PLATES
7.3.1 Specially Orthotropic Plate
7.3.2 Antisymmetric Cross-ply Laminated Plate
7.3.3 Antisymmetric Angle-Ply Laminated Plate
7.4 FREE VIBRATION AND BUCKLING
7.4.1 Specially Orthotropic Plate
7.4.2 Antisymmetric Cross-ply Laminated Plate
7.4.3 Antisymmetric Angle-Ply Laminated Plate
7.5 SHEAR BUCKLING OF COMPOSITE PLATE
7.6 RITZ METHOD
7.7 GALERKIN METHOD
7.8 THIN LAMINATED BEAM THEORY
7.9 PLY STRAIN, PLY STRESS AND FIRST PLY FAILURE
7.10 BIBLIOGRAPHY
7.11 EXERCISES
The formulae presented in this chapter are based on the classical bending theory of thin composite plates. The small deflection bending theory for a thin laminate composite beam is developed based on Bernoulli's assumptions for bending of an isotropic thin beam. The development of the classical bending theory for a thin laminated composite plate follows Kirchhoff's assumptions for the bending of an isotropic plate. Kirchhoff's main suppositions are as follows:
The relations developed earlier in sections 6.12 and 6.13 are essentially based on the above Kirchhoff's basic assumptions. Some of these relations will be utilized in the present chapter to derive the governing equations for thin composite plates. It may be noted that Kirchhoff's assumptions are merely an extension of Bernoulli's from one-dimensional beam to two-dimensional plate problems. Hence a classical plate bending theory so developed can be reduced to a classical beam bending theory. Here, also, the governing plate equations are derived first, and the beam equations are subsequently obtained from the plate equations.
7.2 THIN LAMINATED PLATE THEORY
Consider, a rectangular, thin laminated composite plate of
length a, width b and thickness h as shown in Fig.7.1. The plate consists of a
laminate having n number of laminae with different materials, fibre orientations
and thicknesses. The plate is subjected to surface loads q's and m's per unit
area of the plate as well as edge loads
![]() per unit length. The expansional strains, which may be caused
due to moisture and temperature, are also included. Note that
per unit length. The expansional strains, which may be caused
due to moisture and temperature, are also included. Note that
![]() and w are mid-plane displacement components. It is assumed
that Kirchhoff's assumptions for the small deflection bending theory of a thin
plate are valid in the present case. One of these assumptions is related to
transverse strains
and w are mid-plane displacement components. It is assumed
that Kirchhoff's assumptions for the small deflection bending theory of a thin
plate are valid in the present case. One of these assumptions is related to
transverse strains ![]() which are neglected in derivation of plate kinematic
relations i.e., stress-strain relations.
which are neglected in derivation of plate kinematic
relations i.e., stress-strain relations.
Considering the dynamic equilibrium of an infinitesimally small element dx1 dx2 (Fig. 7.2) the following equations of motion are obtained
![]() (7.1)
(7.1)
![]() (7.2)
(7.2)
![]() (7.3)
(7.3)
![]() (7.4)
(7.4)
![]() (7.5)
(7.5)
where commas are used to denote partial differentiation, and dots relate to differentiation with respect to time, t. Combining Eqs. 7.3 through 7.5, we obtain
 (7.6)
(7.6)
where
 ,
,  and
and
and ![]() is the density of the laminate at a distance z.
is the density of the laminate at a distance z.
Substituting Eqs. 6.60 in Eqs. 7.1, 7.2 and 7.6 and noting Eqs. 6.47
and 6.48,we obtain the following governing differential equations in terms of
mid-plane displacements ![]() and w.
and w.
 (7.7)
(7.7)
 (7.8)
(7.8)
 (7.9)
(7.9)
Note that the rotary inertia effects are usually neglected in development of a thin plate theory.
The proper boundary conditions are chosen from the following combinations:
(7.10)
where the subscript n is the direction normal to the edge of the plate, and relates to the tangential direction.
Equations 7.7 through 7.9 can be further simplified using the stiffnesses listed in Table 6.3 for various kinds of laminates.
For symmetric laminates, Bij = 0 and R = 0. Hence Eqs.7.7, 7.8 and 7.9 can be accordingly modified. Note that these equations become uncoupled. The modified forms of Eqs. 7.7 and 7.8 (with Bij = 0 and R = 0) represent the stretching behaviour of a symmetric laminated plate. The bending behaviour of a symmetric laminated plate is represented by the equation
 (7.11)
(7.11)
However, for a specially orthotropic plate with symmetric cross-ply lamination (D16 = D26 = 0), Eq. 7.11 is further reduced to
 (7.12)
(7.12)
For a homogeneous anisotropic parallel-ply laminate, where all plies have the
same fibre orientation θ, noting that
![]() we obtain from Eq. 7.11.
we obtain from Eq. 7.11.
 (7.13)
(7.13)
In a similar way, for an orthotropic plate with either 00 or 900 fibre orientation, Eq. (7.13) is further simplified using Q16 = Q26 = 0.
For a homogeneous isotropic plate, Q11 = Q22= E/(1-ν2), Q12 = ν Q1,
Q66 = E/[2(1+ ν)] and Q16 = Q26 = 0 and hence Eq. 7.13 reduces to
 (7.14)
(7.14)
where
![]() and expansion moments Me’s are accordingly
derived.
and expansion moments Me’s are accordingly
derived.
The solution of Eqs. 7.8 through 7.10 is difficult to achieve due to the presence of bending-extensional and other coupling terms as well as mixed order of differentiation with respect to x1 and x2 in each relation. The closed form solutions are restricted to a few simple laminate configurations, loading conditions, plate geometry and boundary conditions. The other analytical methods are based on the variational approaches such Rayleigh Ritz method and Galerkin method.
7.3 BENDING OF LAMINATED PLATES
7.3.1 Specially Orthotropic Plate
Consider a rectangular, symmetric cross-ply laminated composite plate (Fig. 7.1) which is subjected to transverse load q only. Equation 7.12 reduces to
![]() (7.15)
(7.15)
All Edges Simply Supported
Consider the simply supported conditions as given below
 (7.16)
(7.16)
We assume the Navier-type of solution. Let
![]() (7.17)
(7.17)
that satisfies the boundary conditions vide Eq. 7.16. Further we assume that
![]() (7.18)
(7.18)
Substitution of Eqs. 7.17 and 7.18 in Eq. 7.15 yields
 (7.19)
(7.19)
Note that, for an isotropic plate,
 (7.20)
(7.20)
The loading coefficient qmn is determined for a specified distribution of transverse load q (x1,x2 ) from the following integral:
 (7.21)
(7.21)
It can be shown that, for a uniformly distributed load q0,
![]() (7.22)
(7.22)
where m, n are odd integers.
Hence for a specially orthotropic plate that is subjected to a transverse uniformly distributed load q0, the deflection w is given by
 (7.23)
(7.23)
where m, n are odd integers.
The moments M1, M2 and M6 and shear forces Q4 and Q5 can be obtained from the following relations:
![]()
![]()
![]() (7.24)
(7.24)
![]()
![]()
We now consider the simply supported conditions at
![]() and either or both of the conditions at
and either or both of the conditions at
![]() (Fig. 7.1) may be simply supported, clamped or free. We can
proceed with the Levy's type of solution. The solution of Eq.7.15 consists of
two parts: homogeneous solution and particular solution. Thus,
(Fig. 7.1) may be simply supported, clamped or free. We can
proceed with the Levy's type of solution. The solution of Eq.7.15 consists of
two parts: homogeneous solution and particular solution. Thus,
![]() (7.25)
(7.25)
For this particular solution wp(x1), the lateral load q(x1) is assumed to have the same distribution in all sections parallel to the x1-axis and the plate is also considered infinitely long the x2-direction. Equation 7.15 takes the following form:
![]() (7.26)
(7.26)
Assume
![]() (7.27)
(7.27)
and
![]() (7.28)
(7.28)
Substituting Eqs. 7.27 and 7.28 in Eq. 7.26, we obtain
![]() (7.29)
(7.29)
Hence the particular solution is given by
![]() (7.30)
(7.30)
The homogeneous solution is obtained from the following form of Eq.7.15
![]() (7.31)
(7.31)
Let us express wh (x1, x2) by
![]() (7.32)
(7.32)
Eq. 7.32 satisfies simply supported boundry conditions at![]() (Eq. 7.16). Substitution of Eq. 7.32 in Eq. 7.31 yields
(Eq. 7.16). Substitution of Eq. 7.32 in Eq. 7.31 yields
 (7.33)
(7.33)
 (7.34)
(7.34)
Let the solution be
![]() (7.35)
(7.35)
Substituting Eq. 7.35 in Eq.7.34, the characteristic equation is obtained as follows:
![]() (7.36)
(7.36)
the solution of which is given by
![]() (7.37)
(7.37)
The value of ![]() , in general, is complex. Hence, the roots of Eq. 7.36 can be
expressed in the form
, in general, is complex. Hence, the roots of Eq. 7.36 can be
expressed in the form ![]() and
and ![]() , where α and β are real and positive and are given as
, where α and β are real and positive and are given as
![]() (7.38)
(7.38)
![]()
 (7.39)
(7.39)
Hence, the solution is
 (7.40)
(7.40)
Hence referring to Eqs. 7.25, 7.30 and 7.40, the final solution w(x1, x2) to Eq. 7.15 can be expressed as follows:
(7.41)
The constant Am, Bm,Cm and Dm are determined
from the relevant boundry conditions at
![]() . Note that qm is determined from the loading
distribution q(x1) using the following integration.
. Note that qm is determined from the loading
distribution q(x1) using the following integration.
 (7.42)
(7.42)
Hence for a uniformly distributed transverse load q0
![]() m = 1,3,5,…
(7.43)
m = 1,3,5,…
(7.43)
The moments and shear forces are computed using Eqs. 7.24.
7.3.2 Antisymmetric Cross-ply Laminated Plate
Now consider the rectangular plate, shown in Fig. 7.1, to be made up of cross-ply laminations of stacking sequence [0/90]n (refer case 6 of Table 6.3). Equations 7.7 through 7.9 then reduce to
![]()
![]() (7.44)
(7.44)
![]()
The simply supported boundary conditions considered here are
![]()
![]() (7.45)
(7.45)
![]()
![]()
Assume the following displacement components
![]()
![]() (7.46)
(7.46)
![]()
that satisfy the simply supported boundary conditions vide Eqs. 7.45. The transverse load q is represented by the double Fourier series in Eq.7.18. Now substitution of Eqs. 7.18 and 7.46 in Eqs 7.44 results in three simultaneous algebraic equations in terms of Amn , Bmn and Wmn. Solving these equations, we obtain
![]()
![]() (7.47)
(7.47)
![]()
where

and η = a/b
Using Eqs. 7.46 and 7.47, the stress and moment resultants (N1, N2 , N6 , M1, M2, and M6 ) are derived from Eqs. 6.52, and the shear forces Q4 and Q5 are obtained from the last two relations of Eqs. 7.24.
Figure 7.3 exhibits the maximum nondimensional deflections (at x1=a/2
and x12=b/2) for simply supported antisymmetric cross-ply laminated
plates, which are plotted against the aspect ratio a/b. The deflections are
considerably higher in the case of a two-layered (n=1) plate because of the
extension-bending coupling (B11). However, as the number of layers
increases, the coupling effect reduces and the results approach to that of an
orthotropic plate (n = ![]() ).
).
7.3.3 Antisymmetric Angle-Ply Laminated Plate
Next consider a rectangular angle-ply laminated composite plate of stacking sequence [±Ø]n (refer case 7 of Table 6.3) that is subjected to transverse load q. Equations 7.7 through 7.9 become
![]()
![]() (7.48)
(7.48)

The following simply supported boundary conditions are assumed
![]()
![]() (7.49)
(7.49)
![]()
![]()
The transverse load q is given by Eq. 7.18. The following displacement field
![]()
![]()
(7.50)
![]()
satisfies simply supported boundary conditions in Eqs. 7.49. Substituting Eqs. 7.18 and 7.50 in Eqs 7.48 and solving the resulting simultaneous algebraic equations we obtain
 (7.51)
(7.51)
where
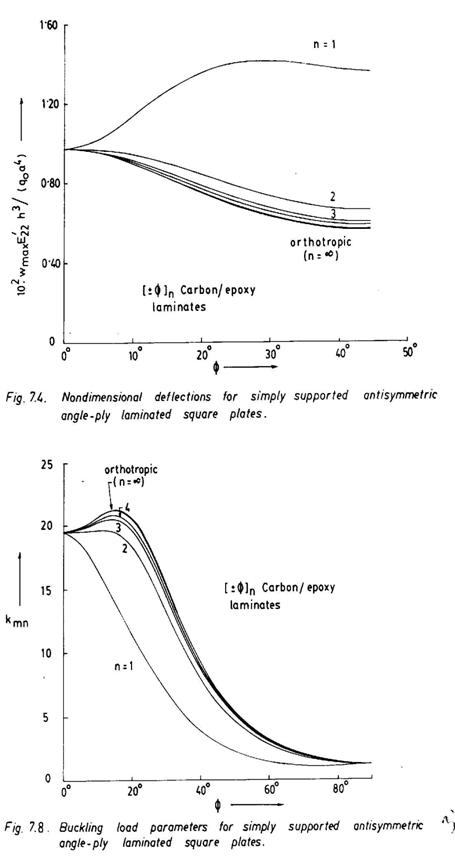
The values of maximum nondimensional deflections (at x1=x2=a/2) for simply supported antisymmetric angle-ply laminated square plates are plotted against the variation of Ø ranging from 0 to 450. A two-layered laminate is found to exhibit much higher deflections due to higher values of coupling terms B16 and B26 compared to the other cases.
7.4 FREE VIBRATION AND BUCKLING
7.4.1 Specially Orthotropic Plate
Consider a rectangular specially orthotropic plate (Fig. 7.5)
which is subjected to compressive loads
![]() and
and ![]() per unit length along the edges. The plate is also assumed to
be vibrating freely in the transverse direction. Equation 7.12 then becomes
(note that
per unit length along the edges. The plate is also assumed to
be vibrating freely in the transverse direction. Equation 7.12 then becomes
(note that ![]() )
)
![]() (7.52)
(7.52)
All Edges Simply Supported
The deflected shape w (x1,x2, t) is assumed in the following form:
![]() (7.53)
(7.53)
that satisfies the simply supported boundary conditions in Eqs. 7.16. Substitution of Eq. 7.53 in Eq. 7.52 yields the frequency equation as follows
 (7.54)
(7.54)
where
![]() ,
, ![]()
![]()
and ![]() . Note that
. Note that ![]() is the circular frequency.
is the circular frequency.
The non-dimensional frequency parameter
![]() can be computed for a particular mode shape m and n for
various values of aspect ratio (a/b), stiffness ratios and inplane loads. From
Eq. 7.54, it is evident that a critical combination of compressive inplane
biaxial loads can reduce the frequency to zero. When the frequency is zero, the
inplane loads correspond to the buckling loads of the plate. Further, it may be
noted that the tensile inplane loads will increase the frequency of the plate.
can be computed for a particular mode shape m and n for
various values of aspect ratio (a/b), stiffness ratios and inplane loads. From
Eq. 7.54, it is evident that a critical combination of compressive inplane
biaxial loads can reduce the frequency to zero. When the frequency is zero, the
inplane loads correspond to the buckling loads of the plate. Further, it may be
noted that the tensile inplane loads will increase the frequency of the plate.
For a laminated plate, where the compressive edge load
![]() acts along the simply supported edges x1=0,a and
the unloaded edges x2=0, b may have any arbitrary boundary condition,
a solution to Eq . 7.52 (note that
acts along the simply supported edges x1=0,a and
the unloaded edges x2=0, b may have any arbitrary boundary condition,
a solution to Eq . 7.52 (note that ![]() ) can be assumed to be in the form
) can be assumed to be in the form
![]() (7.55)
(7.55)
Substituting Eq. 7.55 in Eq. 7.52 yields
 (7.56)
(7.56)
A solution to Eq. 7.56 can be obtained as follows
![]() (7.57)
(7.57)
Substituting Eq. 7.57 in Eq. 7.56 we obtain
![]() (7.58)
(7.58)
where
and
with ![]()
Equation 7.58 has four roots i.e., ![]() with
with
![]()
and ![]()
Thus the solution is
![]()
![]() (7.59)
(7.59)
The coefficients Am, Bm, Cm and Dm are determined from boundary conditions at x2=0, b. For example, let us consider the clamped edges along x2=0, b i.e.,
X2=0,b: w=w, 2=0 (7.60)
Combining Eqs. 7.59 and using Eqs. 7.60, we obtain the following homogeneous algebraic equations
(7.61)
The frequency equation is obtained from the condition that the determinant of the coefficients of Am, Bm, Cm and Dm must vanish. This leads to
![]() (7.62)
(7.62)
The critical value of N is computed by satisfying Eq. 7.62 for a particular m when the frequency becomes zero.
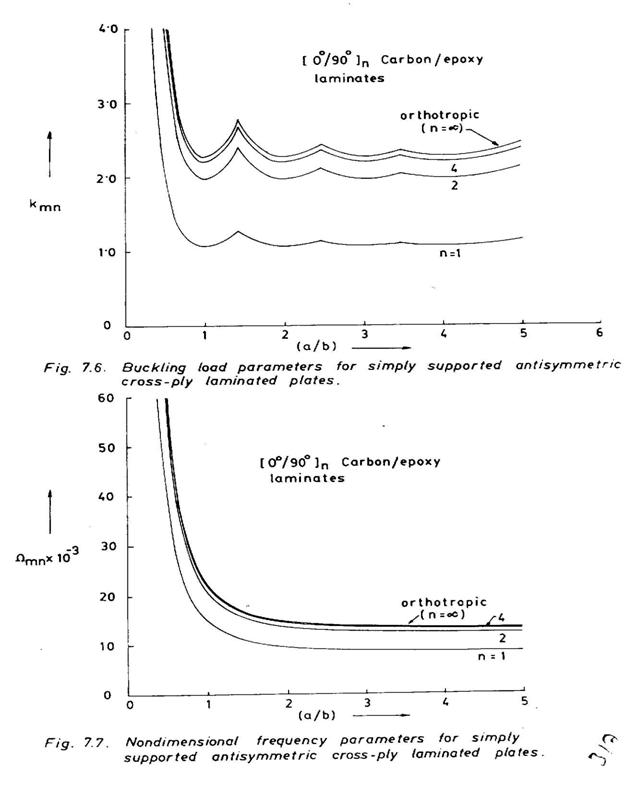
7.4.2 Antisymmetric Cross-ply Laminated Plate
Consider the transverse force vibration of a simply supported
rectangular antisymmetrically laminated cross-ply plate (see section 7.3.2),
when subjected to compressive loads ![]() ,
, ![]() and
and ![]() . Equations 7.44 hold good except the third equation where 'q'
is replaced by “
. Equations 7.44 hold good except the third equation where 'q'
is replaced by “![]() “. The following displacement field
“. The following displacement field
![]()
![]() (7.63)
(7.63)
![]()
satisfy the boundary conditions in Eqs. 7.45. These, on substitution in Eqs. 7.44 modified as above, result in the following homogeneous algebraic equations:
 (7.64)
(7.64)
where
![]()
![]()
![]()
![]()
![]()
![]()
![]()
and ![]() .
.
The frequency relation is derived by vanishing the determinant of the coefficient matrix of Eq. 7.64 and is given by
 (7.65)
(7.65)
wher ![]() and kmn are defined in Eq. 7.54.
and kmn are defined in Eq. 7.54.
The critical buckling load corresponds to the lowest value of k
that satisfies Eq. 7.65 when the frequency is zero. The load parameters, kmn
and nondimensional frequency parameters,
![]() are plotted against the aspect ratio, a/b for simply
supported antisymmetric cross-ply laminate as shown in Figs. 7.6 and 7.7,
respectively.
are plotted against the aspect ratio, a/b for simply
supported antisymmetric cross-ply laminate as shown in Figs. 7.6 and 7.7,
respectively.
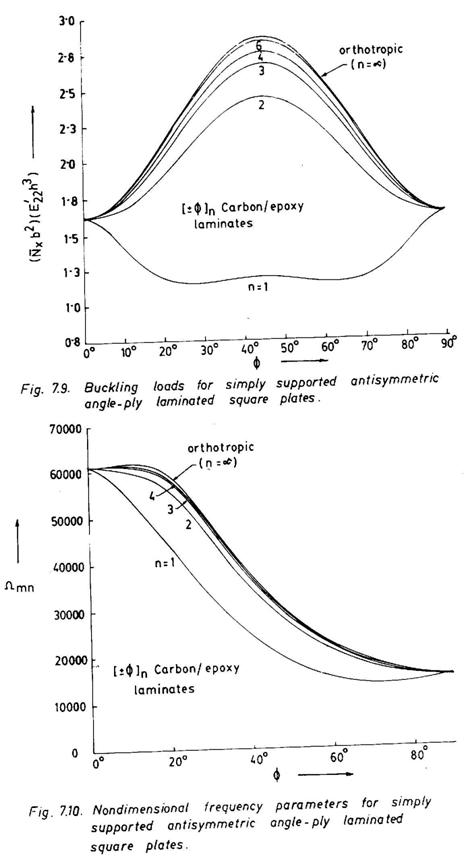
7.4.3 Antisymmetric Angle-Ply Laminated Plate
Now consider the transverse free vibration of a simply supported
rectangular antisymmetric angle-ply laminated plate (vide section 7.3.3) which
is subjected to compressive loads ![]() ,
, ![]() and
and ![]() . The third equation in Eqs. 7.48 is modified substituting -
. The third equation in Eqs. 7.48 is modified substituting -
![]() in place of q. The displacement field that satisfies the
boundary conditions in Eqs. 7.49 is assumed as
in place of q. The displacement field that satisfies the
boundary conditions in Eqs. 7.49 is assumed as
![]()
![]() (7.66)
(7.66)
![]()
These displacement relations, when substituted in the modified Eqs. 7.48 yield the following homogeneous algebraic equations:
(7.67)
where
![]()
![]()
![]()
![]()
![]()
![]()
![]()
The condition that the determinant of the coefficient matrix in Eq.7.67 vanishes, determines the frequency equation as follows:
 (7.68)
(7.68)
where


![]()
Figures 7.8 and 7.9 depict the variation of bucklin
g load parameters and Figure
7.10 shows that of the frequency parameter
![]() for simply supported antisymmetric angle-ply laminated square
plates.
for simply supported antisymmetric angle-ply laminated square
plates.
7.5 SHEAR BUCKLING OF COMPOSITE PLATE
A closed form solution for the shear buckling of a finite
composite plate does not exist. This is true also for an isotropic panel. Here
the solution of a long specially orthotropic composite plate is considered.
Consider the plate to be infinite along the x1 direction and is
subjected to uniform shear along the edges x2 = ±b/2 (Fig. 7.11). In
absence of inertia and other loads except the edge shear
![]() , Eq. 7.12 becomes
, Eq. 7.12 becomes
![]() (7.69)
(7.69)
Assuming the solution to be of the form
![]() (7.70)
(7.70)
where k is a longitudinal wave parameter and
![]() . Substituting Eq. 7.70 in Eq.7.69 we obtain
. Substituting Eq. 7.70 in Eq.7.69 we obtain
![]() (7.71)
(7.71)
A solution to Eq.7.71 is assumed to be of the form
![]() (7.72)
(7.72)
which on substitution in Eq. 7.71 yields the following characteristic equation
![]() (7.73)
(7.73)
Equation 7.73 has four roots ![]() and the solution to Eq. 7.69 is written as follows:
and the solution to Eq. 7.69 is written as follows:
![]() (7.74)
(7.74)
Combining Eqs. 7.70 and 7.74, the solution is obtained as
![]() (7.75)
(7.75)
The substitution of Eq. 7.75 in the specified boundary conditions at the edges x2
= ±b/2 will result four homogeneous algebraic equations in terms of the four
coefficients A, B, C and D. For a non-trivial
solution, the determinant of this coefficient matrix must vanish. This condition
yields the equation for the shear buckling problems. The critical buckling load
corresponds to the minimum value of ![]() at particular value of k.
at particular value of k.
The Ritz method (also known as the Rayleigh-Ritz method), in
most cases, leads to an approximate analytical solution unless the chosen
displacement configurations satisfy all the kinematic boundary conditions and
compatability conditions within the body. It is developed minimizing energy
functional ![]() on the basis of energy principles. The principle of minimum
potential energy can be used for formulation of static bending and buckling
problems. The free vibration problem is formulated using Hamilton 's principle.
on the basis of energy principles. The principle of minimum
potential energy can be used for formulation of static bending and buckling
problems. The free vibration problem is formulated using Hamilton 's principle.
The total strain energy of a general laminated plate is given by (Fig. 7.1)
 (7.76)
(7.76)
Substituting Eq. 6.59 in Eq . 7.76, one obtains
 (7.77)
(7.77)
Substituting Eqs.6.47 through 6.49 in Eq. 7.77, and using Eqs. 6.53, 6.61 and 6.62 we obtain
 (7.78)
(7.78)
The potential energy of external surface tractions and edge loads due to the deflections of the plate is given by
 (7.79)
(7.79)
The kinetic energy of the laminated plate can be expressed as
 (7.80)
(7.80)
where P, R, and I are defined in Eqs. 7.6.
The Ritz method can be utilized for seeking solution to a particular problem. The approximate displacement functions are chosen to be in the following form
![]()
![]() (7.81)
(7.81)
![]()
where the shape functions u1i(x1, x2), u2i(x1, x2) and wi(x1, x2) are capable of defining the actual deflection surface and satisfy individually atleast the geometric boundary conditions, and a1, b1, and c1 are undetermined constants.
For the bending of a general laminated plate, the energy functions,
![]() is defined as
is defined as
![]() (7.82)
(7.82)
where U and V are represented in Eqs 7.78 and 7.79, respectively.
The principle of minimum potential energy leads to the following conditions.
![]() (7.83)
(7.83)
that provide m + n + r simultaneous algebraic equations for the computation of m+n+r unknown coefficients ai, bi, and ci. The approximate solution is thus obtained by substituting these coefficients in the assumed displacement functions in Eqs 7.81.
For the solution of plate buckling problem, only the edge loads are
retained assuming ![]() ,
, ![]() ,
, ![]() in the expression for the potential energy V in Eqs. 7.79 and
7.82. The application of conditions in Eq. 7.83 results a set of m+n+r algebraic
homogeneous equations in terms of m+n +r coefficients ai, bi,
and ci. The vanishing of the determinant of the coefficient matrix
yields the buckling equation from which critical buckling loads are determined.
in the expression for the potential energy V in Eqs. 7.79 and
7.82. The application of conditions in Eq. 7.83 results a set of m+n+r algebraic
homogeneous equations in terms of m+n +r coefficients ai, bi,
and ci. The vanishing of the determinant of the coefficient matrix
yields the buckling equation from which critical buckling loads are determined.
For the free vibration problem, the displacement functions in Eqs. 7.81 can be modified to include the time dependence as follows:
![]()
![]() (7.84)
(7.84)
![]()
where the U1(x1, x2), U2(x1,
x2), and W(x1, x2), correspond to
the right-hand-side expressions in Eqs. 7.81. The energy functional П*
includes the strain energy U and kinetic energy T. Hence П* = U+T. In
the absence of surface forces and moments, edge loads and expansional stress
resultants and moments, and substituting Eq. 7.84 in the above energy functional
П* and carrying out the derivation of П*with respect to ai,
bi, and ciand equating them to zero i.e.
![]() ,
, ![]() and
and ![]() , we obtain a set of m+n+r coefficients ai, bi,
and ci. The frequency equation is derived from the condition that the
determinant of the coefficient matrix must vanish.
, we obtain a set of m+n+r coefficients ai, bi,
and ci. The frequency equation is derived from the condition that the
determinant of the coefficient matrix must vanish.
The Galerkin method utilizes the governing differential equations of the problem and the principle of virtual work to formulate the variational problem. Here the virtual work of internal forces is obtained directly from the differential equations without determining the strain energy. The Galerkin method appears to be more general than the Ritz method and can be very effectively utilized to solve diverse general laminated plate bending problems involving small and large deflection theories, linear and nonlinear vibration and stability of laminated plates and so on.
Consider a general laminated plate (Fig. 7.1) to be in a state of static equilibrium under loads q1,q2 and q only Then the governing differential equations in Eqs. 7.7 through 7.9 can be expressed as follows:
![]()
![]() (7.85)
(7.85)
![]()
The equilibrium of the plate is obtained by integrating Eqs. 7.85 over the
entire area of the plate. Note that, if required, the edge loads
![]() and expansional force resultants and moments can also be
included in Eqs. 7.85.
and expansional force resultants and moments can also be
included in Eqs. 7.85.
Assuming small arbitrary variations of the displacement functions
![]() and applying the principle of virtual work, we obtain the
variational equations as follows:
and applying the principle of virtual work, we obtain the
variational equations as follows:
 (7.86)
(7.86)

As in the Ritz method, we assume the approximate displacement functions in Eqs. 7.81, where the shape functions u1i(x1,x2), u2i(x1,x2) and wi(x1,x2), satisfy the displacement boundary conditions but not necessarily the forced boundary conditions, in which case the method leads to an approximate solution.
Now,
![]()
![]() (7.87)
(7.87)
![]()
Substitution of Eq. 7.87 in Eq. 7.86 yields

 (7.88)
(7.88)

The variations of expansion coefficients
![]() are arbitary and not inter-related. This provides m+n+r
equations.
are arbitary and not inter-related. This provides m+n+r
equations.


 (7.89)
(7.89)
to determine m+n+r unknown coefficients ai, bi, and ci.
Note that, in a rigorous sense, the variational relations in Eqs.
7.86 are valid only, if the assumed displacement functions
![]() are the exact solutions of the problem. Thus, when these
displacements are kinematically admissible and satisfy all the prescribed
boundary conditions and compatibility conditions within the plate, the method
leads to an exact solution.
are the exact solutions of the problem. Thus, when these
displacements are kinematically admissible and satisfy all the prescribed
boundary conditions and compatibility conditions within the plate, the method
leads to an exact solution.
Equations 7.85 can be used for the buckling analysis of a laminated
composite plate assuming q1= q2=0 and replacing “q” with “![]() ” where
” where ![]() ,
, ![]() and
and ![]() . Following Eqs. 7.86 through 7.89 we obtain the variational
relations of the following form:
. Following Eqs. 7.86 through 7.89 we obtain the variational
relations of the following form:
 (7.90)
(7.90)
Equations 7.90 are a set of m+n+r homogeneous algebraic equations in terms of m+n+r coefficients ai, bi, and ci. The condition that for a non-trivial solution, the determinant of the coefficient matrix should vanish yields the buckling equation.
For the free vibration problem, the displacement functions are assumed to be of the form given in Eqs. 7.84. Considering only the transverse inertia in Eqs. 7.7 through 7.9 and neglecting surface forces and moments, edge loads and expansional stress resultants and moments, we obtain, following the procedure as in the case of buckling above, the variational relations of the form
 (7.91)
(7.91)

These are, again, a set of m+n+r homogeneous algebraic equations in terms of m+n+r coefficients ai, bi, and ci. The frequency equation is established from the condition that the determinant of the coefficient matrix must vanish so as to obtain a non-trivial solution.
7.8 THIN LAMINATED BEAM THEORY
The small deflection bending theory of thin laminated composite beams can be developed based on Bernoulli's assumptions for bending of an isotropic beam. Note that Kirchhoff's assumptions are essentially an extension of Bernoulli's assumptions to a two-dimensional plate problem. Hence the governing laminated plate equations as developed in earlier sections can be reduced to one-dimensional laminated beam equations.
Consider a thin laminated narrow beam of length L, unit width and thickness h (Fig. 7.12). The governing differential equations defined in Eqs. 77 through 7.9 reduce to the following two one-dimensional forms:
![]()
![]() (7.92)
(7.92)
Consider the bending of a laminated composite shown in Fig. 7.12 under actions of transverse load q(x1) only. Equations (7.92) assume the form
![]()
![]() (7.93)
(7.93)
Consider, for example, the following simply supported boundary conditions at x1 = 0, L:
![]()
and ![]() (7.94)
(7.94)
Assume the displacement functions to be of the forms
![]()
![]() (7.95)
(7.95)
that satisfy the boundary conditions in Eqs. 7.94. Assume the transverse load q(x1) as
![]() (7.96)
(7.96)
Substituting Eqs. 7.95 and 7.96 in Eqs. 7.93 and carrying out the algebraic manipulation, we obtain
and  (7.97)
(7.97)
where qm for a particular distribution of load q(x1) is obtained from
 (7.98)
(7.98)
Equations 7.95 in conjunction with Eqs. 7.97 provide solution to the above beam
bending problem. Note, that for a uniformly distributed transverse load q0,
![]()
Next consider the free transverse vibration and
buckling of a simply supported laminated beam. The following governing
differential equations are considered (![]() ; see Eqs. 7.92):
; see Eqs. 7.92):
![]()
![]() (7.99)
(7.99)
The displacement functions chosen are
![]()
![]() (7.100)
(7.100)
that satisfy the boundary conditions defined by Eqs. 7.94. Substituting Eqs. 7.100 in Eqs. 7.99, we obtain two algebraic homogeneous equations in terms of coefficients Um and Wm. For a non-trivial solution, the determinant of the coefficient matrix must vanish. This yields the frequency equation to be in the form
 (7.101)
(7.101)
Note that the critical buckling load, Ncr, corresponds to the minimum value of compressive force N for a specific mode shape m, when the frequency is zero.
It is to be mentioned that the approximate analysis methods such as the Ritz method and Galerkin method can be used to obtain solutions for laminated composite beams with various other support conditions for which closed form solutions may not be easily obtainable.
7.9 PLY STRAIN, PLY STRESS AND FIRST PLY FAILURE
Once the mid-plane displacement
![]() are determined, as discussed in the previous sections, the
mid-plane strains
are determined, as discussed in the previous sections, the
mid-plane strains ![]() and curvatures k1, k2 and k6
are determined using Eqs. 6.47 and 6.48. Next the strains
and curvatures k1, k2 and k6
are determined using Eqs. 6.47 and 6.48. Next the strains
![]() for any ply located at a distance z from the mid-plane (see
Fig. 6.16) are computed utilizing Eqs. 6.49. Equations 6.50 are then employed to
determine the ply stresses
for any ply located at a distance z from the mid-plane (see
Fig. 6.16) are computed utilizing Eqs. 6.49. Equations 6.50 are then employed to
determine the ply stresses ![]() at the same location. In some cases, it is required to
determine the stresses in each ply, that correspond to the material axes x1'
and x2' (Fig. 6.12). These are obtained using the following relations
(see Eqs. A.11and A.19):
at the same location. In some cases, it is required to
determine the stresses in each ply, that correspond to the material axes x1'
and x2' (Fig. 6.12). These are obtained using the following relations
(see Eqs. A.11and A.19):
 (7.102)
(7.102)
where m = cos Ø and n = sin Ø
In many practical design problems, the first ply failure is usually the design criterion. Once the stresses are determined in each ply of a laminate, one of the failure theories presented in section 6.14 is employed to determine the load at which any one of the laminae in the laminated structure fails first ('first ply failure'). The laminate failure, however, corresponds to the load at which the progressive failure of all plies takes place. The estimation of the laminate strength is more complex.
1. Derive the governing differential equations as defined in Eqs.7.7, 7.8 and 7.9.
2. Determine the deflection equation for a simply supported square (axa) symmetric laminated plate subjected to a transverse load q=q0 x1/a.
3. Determine the deflection equation for a square (axa) symmetric laminated plate subjected to a transverse load q=q0 x1/a when the edges at x1 = 0, a are simply supported and those at x2 = 0, b are clamped.
4. A simply supported antisymmetric cross-ply laminated (00/900/00/900) kelvar/epoxy composite square plate (0.5m x 0.5m x 5mm) is subjected to a uniformly distributed load of 500N/m2. Determine the deflection an dply stresses at the centre of the plate. Use properties listed in Table 6.1.
5. A simply supported antisymmetric angle-ply laminated (450/-450/450/-450) carbon/epoxy composite plate (0.75m x 0.5m x 5mm) is subjected to a uniformly distributed transverse load q0. Determine the load at which the first ply failure occurs. Use the Tsai-Hill or Tsai-Wu strength criterion. See Table 6.1 and also assume X '11t =1450 MPa, X '11c =1080 MPa, X '22t =60 MPa,
X'22c =200 MPa and X '12= 80 MPa.
6. Determine the transverse natural frequencies for the plates defined in Problems 4 and 5 above. Neglect the transverse load.
7. Determine the uniaxial compressive buckling loads for the plates defined in problem 4 and 5 above. Neglect the transverse load.
8. Make a comparative assessment between the Ritz method and the Galerkin method.